サーボを動かしてみる編
マイコンが正常に動くことを確認したので、
次は、サーボモータが動くことを確認しましょう。
タイマーWのPWM出力を使って8~20[ms]周期のパルスを生成。
1.5[ms]を中心にパルス長で角度指令を入力ってことですね。←おぼえがき。
今回は、20[ms]と10[ms]の周期を使ってみました。
ホントにどっちでもイケるんか!?と。
まずは、基板をつくってみる。
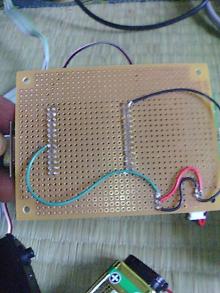
久しぶりに半田ごてでちょこまかやってみました。
一応覚えがき:
黒:GND 駆動用電源&マイコン(CN1-P1)&サーボ端子
赤:6V 駆動用電源&サーボ端子
緑:信号 マイコンFTIOB(CN2-11)&サーボ端子
寮の部屋で何やってんだろう?って気になりましたが、
まぁ、オタクっぽいのは気にせず生きましょう。
とりあえず、ハード側はこれでOKなはず。(はず。)
次はソフト編。
と思ったんですが、イチから調べていくのは面倒くさいので、
ネット上からさくっとひろってきました。(参考にさせていただきました。)
ちょっとだけ書き換えて、いざコンパイル☆
・・・・
・・・・・・Error : 3664.h : No such file or directory
・・・・こいつは3664じゃなくて3694ってことになってるんでした(汗
(昨日の記事参照。)ヘッダーも3694にして下さいね(誰が?)
ヘッダーを直したら、あららコンパイル成功。
そんなわけで、流してみる。
・・・・・
・・・・・・・・
動いたぁ!!!!!
とまぁ、テンション上げてみたものの、
当然と言えば当然ですね。
自分で何もいじってないんですから。
とりあえず、サーボも正常だってことが確認できました。
よかったよかった。
次なるソフト側の課題は、
モータの数ですな。
現状では、PWMポート数の関係上、モータを3つまでしか動かせない。
これをソフト的にうまいことやって
10個のモータを動かさなきゃならないわけですな。
できる人がやれば簡単なんでしょうが・・・・^^;;
ここら辺が安いマイコンのつらいとこでしょうか?(素人の発言ですが)
ウン万円もする高いマイコンだと30個ぐらいサーボが動かせたりするんですね。。。
すごい時代ですね。
どっかに書いてあった二つの割り込みを組み合わせてやる方法が
まだ理解できてないので、勉強してみます。
ホントはICとか使ってハード的にやるのがいいらしいんですが・・・
ん?待てよ。。。これってもしかして
ものすごい初歩的なことですか?
みなさんにとっては、常識なんですかね?
おまえ、何言ってんの!?って言われてしまうんですかね??
だったら、ちょっとハズカシイ。
でも、ホントに素人なんで、勘弁してやってください。
これからもがんばっていきます。
よろしくお願いいたします。
次は、サーボモータが動くことを確認しましょう。
タイマーWのPWM出力を使って8~20[ms]周期のパルスを生成。
1.5[ms]を中心にパルス長で角度指令を入力ってことですね。←おぼえがき。
今回は、20[ms]と10[ms]の周期を使ってみました。
ホントにどっちでもイケるんか!?と。
まずは、基板をつくってみる。

久しぶりに半田ごてでちょこまかやってみました。
一応覚えがき:
黒:GND 駆動用電源&マイコン(CN1-P1)&サーボ端子
赤:6V 駆動用電源&サーボ端子
緑:信号 マイコンFTIOB(CN2-11)&サーボ端子

寮の部屋で何やってんだろう?って気になりましたが、
まぁ、オタクっぽいのは気にせず生きましょう。
とりあえず、ハード側はこれでOKなはず。(はず。)
次はソフト編。
と思ったんですが、イチから調べていくのは面倒くさいので、
ネット上からさくっとひろってきました。(参考にさせていただきました。)
ちょっとだけ書き換えて、いざコンパイル☆
・・・・
・・・・・・Error : 3664.h : No such file or directory
・・・・こいつは3664じゃなくて3694ってことになってるんでした(汗
(昨日の記事参照。)ヘッダーも3694にして下さいね(誰が?)
ヘッダーを直したら、あららコンパイル成功。
そんなわけで、流してみる。
・・・・・
・・・・・・・・
動いたぁ!!!!!
とまぁ、テンション上げてみたものの、
当然と言えば当然ですね。
自分で何もいじってないんですから。
とりあえず、サーボも正常だってことが確認できました。
よかったよかった。
次なるソフト側の課題は、
モータの数ですな。
現状では、PWMポート数の関係上、モータを3つまでしか動かせない。
これをソフト的にうまいことやって
10個のモータを動かさなきゃならないわけですな。
できる人がやれば簡単なんでしょうが・・・・^^;;
ここら辺が安いマイコンのつらいとこでしょうか?(素人の発言ですが)
ウン万円もする高いマイコンだと30個ぐらいサーボが動かせたりするんですね。。。
すごい時代ですね。
どっかに書いてあった二つの割り込みを組み合わせてやる方法が
まだ理解できてないので、勉強してみます。
ホントはICとか使ってハード的にやるのがいいらしいんですが・・・
ん?待てよ。。。これってもしかして
ものすごい初歩的なことですか?
みなさんにとっては、常識なんですかね?
おまえ、何言ってんの!?って言われてしまうんですかね??
だったら、ちょっとハズカシイ。
でも、ホントに素人なんで、勘弁してやってください。
これからもがんばっていきます。
よろしくお願いいたします。