ちょっと前進☆
昨日今日は、ひさしぶりに予定のない週末。
ってことで、
だらぁぁぁぁぁぁぁぁ~~~~~~~~~~っとすごしました。
・・・最高やね。
実は先週末に東京に出る機会があったので、
心のスープカレーを食べてきました♪
それはさておき、
ちょっと秋葉原に寄って、ツクモのロボット館をのぞいてきました。
そして、買ってみました。サーボ。
GWSのS03T/2BB
ってやつです。
やっぱり貧乏人としては、安いのが一番!
1600円/一個ですよ☆
しかしながら2BBモデルってことで、ボールベアリングが2つ入ってるそうな!!
まだ開けてないんですが、これはお得ですね~ ウンウン
トルクもまぁまぁあるし、ちょっと遅いらしいけど、これで十分じゃないでしょうかね
とりあえず、片足を作りたいと思ったので
KONDOさんを片足に1個使って、残りの4つをGWSで仕上げてみようと思います。
さて、買ってしまったら、やはり動かしてみたくなるもの。。。
ってことで、今日は軽く動かしてみました。
片足分:5軸を同時に動かせるようにしてみようってことですが、
どうせなら両足の10軸・・・
どうせなら、(遠い将来)上半身をつけるために、
16軸動かせるようにしてみました!
ネット上でいろんな方が公開してくださってるおかげで、
なんとかできましたよ。
とりあえず、構成を軽く説明↓
・タイマーWでオーバーフローとコンベアマッチA,B,C,Dで割り込み発生。
・オーバーフローのタイミングを
2.5[ms]→2.5[ms]→2.5[ms]→2.5[ms]→10[ms]
になるように、オーバーフロー割り込み発生時に次のTCNTを操作。
・2.5[ms]周期のスタート時にIOポート1のスイッチオン
・コンベアマッチ割り込み発生時にスイッチオフ。
・次の2.5[ms]周期のスタートでIOポート2のスイッチオン
・コンベアマッチ割り込みでオフ。
・上記を4回繰り返し、10[ms]の周期に移行。
10[ms]の間に、次の軌道を計算。
・また4回繰り返す。
うぅぅぅぅぅぅ~~~~~
何を言ってるかぜんぜんわからない。。。
自分ではわかってるつもりなんだけど。。。
誰も読まないだろうから、よしとしましょう。
つまりは、タイマーWで割り込みをいっぱいかけて、IOポートに流すことで
それぞれのポートに20[ms]周期のパルスを作ってやるってことです。
この構成でいくと、
一つのコンベアマッチレジスタ(?)につき、4本のパルスが取れるので、
A~Dを使えば、
4×4=16[軸]
の制御ができる!ってことです。
もっとわかりやすい説明が欲しい方は、こちら へ。
↑勝手にリンクさせていただいて、ごめんなさい。
↑ついでに言うと、ちょっとだけ記述が間違ってるところがありそうなので、ご注意。
さて、このソフトに合わせて、基板を造ってみました。
とりあえず、当面の10軸分取り出せるように、
こんな感じになりました↓
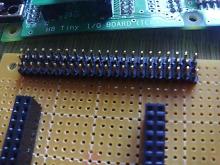

う~ん。。。キタナイねぇ。。。
そして、いよいよ
コンパイル。
転送。
サーボ接続。
スイッチオン。
(中略)・・・失敗多数含む。
動いたぁ!!!
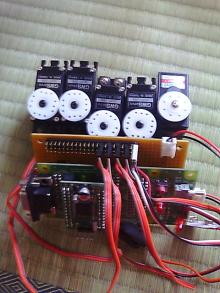
まぁ、動きましたよ。
それぞれ別の動きをさせても、
一応別の動きをしてくれたんで、まぁ、大丈夫だろうと。
今日はひさしぶりにちょっと嬉しい感じでした。
さて、サーボが動くからには、
そろそろハードを造らなくては。。。
最近地味に忙しいんだよな。。。。
がんばっていきます。
以上でした。
今後ともよろしくお願いいたします。
ってことで、
だらぁぁぁぁぁぁぁぁ~~~~~~~~~~っとすごしました。
・・・最高やね。
実は先週末に東京に出る機会があったので、
心のスープカレーを食べてきました♪
それはさておき、
ちょっと秋葉原に寄って、ツクモのロボット館をのぞいてきました。
そして、買ってみました。サーボ。
GWSのS03T/2BB
ってやつです。
やっぱり貧乏人としては、安いのが一番!
1600円/一個ですよ☆
しかしながら2BBモデルってことで、ボールベアリングが2つ入ってるそうな!!
まだ開けてないんですが、これはお得ですね~ ウンウン
トルクもまぁまぁあるし、ちょっと遅いらしいけど、これで十分じゃないでしょうかね
とりあえず、片足を作りたいと思ったので
KONDOさんを片足に1個使って、残りの4つをGWSで仕上げてみようと思います。
さて、買ってしまったら、やはり動かしてみたくなるもの。。。
ってことで、今日は軽く動かしてみました。
片足分:5軸を同時に動かせるようにしてみようってことですが、
どうせなら両足の10軸・・・
どうせなら、(遠い将来)上半身をつけるために、
16軸動かせるようにしてみました!
ネット上でいろんな方が公開してくださってるおかげで、
なんとかできましたよ。
とりあえず、構成を軽く説明↓
・タイマーWでオーバーフローとコンベアマッチA,B,C,Dで割り込み発生。
・オーバーフローのタイミングを
2.5[ms]→2.5[ms]→2.5[ms]→2.5[ms]→10[ms]
になるように、オーバーフロー割り込み発生時に次のTCNTを操作。
・2.5[ms]周期のスタート時にIOポート1のスイッチオン
・コンベアマッチ割り込み発生時にスイッチオフ。
・次の2.5[ms]周期のスタートでIOポート2のスイッチオン
・コンベアマッチ割り込みでオフ。
・上記を4回繰り返し、10[ms]の周期に移行。
10[ms]の間に、次の軌道を計算。
・また4回繰り返す。
うぅぅぅぅぅぅ~~~~~
何を言ってるかぜんぜんわからない。。。
自分ではわかってるつもりなんだけど。。。
誰も読まないだろうから、よしとしましょう。
つまりは、タイマーWで割り込みをいっぱいかけて、IOポートに流すことで
それぞれのポートに20[ms]周期のパルスを作ってやるってことです。
この構成でいくと、
一つのコンベアマッチレジスタ(?)につき、4本のパルスが取れるので、
A~Dを使えば、
4×4=16[軸]
の制御ができる!ってことです。
もっとわかりやすい説明が欲しい方は、こちら へ。
↑勝手にリンクさせていただいて、ごめんなさい。
↑ついでに言うと、ちょっとだけ記述が間違ってるところがありそうなので、ご注意。
さて、このソフトに合わせて、基板を造ってみました。
とりあえず、当面の10軸分取り出せるように、
こんな感じになりました↓


う~ん。。。キタナイねぇ。。。
そして、いよいよ
コンパイル。
転送。
サーボ接続。
スイッチオン。
(中略)・・・失敗多数含む。
動いたぁ!!!

まぁ、動きましたよ。
それぞれ別の動きをさせても、
一応別の動きをしてくれたんで、まぁ、大丈夫だろうと。
今日はひさしぶりにちょっと嬉しい感じでした。
さて、サーボが動くからには、
そろそろハードを造らなくては。。。
最近地味に忙しいんだよな。。。。
がんばっていきます。
以上でした。
今後ともよろしくお願いいたします。