onPC参加します。
どもです、どもです。
ご無沙汰です。
onPC!なんてカテゴリを作ってしまいました。
さてさて、普通に宣言します。
【ROBO-ONE onPC / Sat. 1st】に参戦します。
(HPはコチラ )
おそらく、ミッションなんてまともにクリアできないと思いますが、
今の僕にできる限りの力で、がんばります。
よろしくお願いいたします。
今までの進捗状況をお伝えしますと・・・
○Inventorをインスコしました。
かなりしっかりした3DCADソフトです。
ちなみに、PCの推奨スペックはコチラ (※PDFです)
---(ここから要約)---
推奨スペック
CPU: Pentium 4 3.0GB以上
メモリ: 3GB以上
HDD: 3.5GB以上の空き容量
---(ここまで要約)---
・・・アホかと。
HDDは結構使うんやね。。。程度の印象だけど、
CPUは。。。最近の良いマシンならクリアできるのかな。。。
メモリは。。。個人でこんなマシン持ってる人いるんでしょうか!?
そんなん無理っすわ。
(まぁ、個人で買うようなことを想定してるソフトじゃないんで、いいんですけどね。。。)
ってことで、自分のPCのスペック公開
CPU: Duron 950MHz (AMD)
メモリ: 512MB
HDD: 20GB空き (トータル50GBくらい)
本気でデルコンあたりを買おうか考えました。。。
金銭的に無理でした。。。orz
ってことで、このスペックで戦っていきます。
○メカ構成を妄想
たぶん今回、ネックになるのがサイズと質量。
そして、上記を満たしながら30Gに耐える構造。
というわけで、ロボットの全体構成を妄想していました。
サーボの選定がかなり重要になってきそうなので、のんびり選んでました。
あと、角速度を抑える手段。
以前のミッションでは、スラスター(推力発生装置)を使ってたみたいですが、
今回は。。。使っていいのかな?
とりあえず、今回のミッションでは、スラスターなしでもいけそうなので
ナシで行ってみます。
【リアクションホイール】でしたっけ?
ジャイロちっくなコマを仕込んでみようと思います。
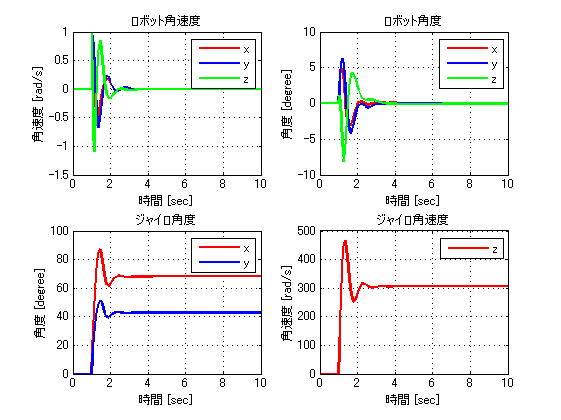
○制御系を妄想
なぜか、たまたま、MATらぶを使用できる環境にあるので、
しみゅリンク使って超簡単なロボットのモデル(直方体で質量だけ1kgにしたもの)を
使って角速度を抑えるシミュレーションをしてみました。
これでうまくいってから設計をしようかな~と思ったので。
予想以上に時間がかかってしまいましたが、なんとかなりそうです。
いちおう、結果はコチラ↓
1[s]にロボット角速度をステップ状に1を入力しています。

えぇ~っと、ネタバレするので、よく見ないでください。
何かをパクっていただいても構いませんが、何も保証しません。
古典制御ってやつです。
PIDブロックを6個くらい使ってしまいました。
○メカを作りはじめる。
再びInventorに戻って設計を始めたのが、ついさっき。
あらあら、出遅れてますね。
とりあえず、予定しているRobot Labsのサーボを超テキトーに書いてみました。
さらに、1000cm^3の箱と一緒にならべてみました。

・・・これ、16軸も入らねぇだろっ!!
まぁ、ここら辺は、今後がんばっていきますよ。
さて、長くなってしまいました。
これを読んで何か得する方は、まずいないでしょう。
備忘録なんで。
では、
ぐっばいマルコフ。
ご無沙汰です。
onPC!なんてカテゴリを作ってしまいました。
さてさて、普通に宣言します。
【ROBO-ONE onPC / Sat. 1st】に参戦します。
(HPはコチラ )
おそらく、ミッションなんてまともにクリアできないと思いますが、
今の僕にできる限りの力で、がんばります。
よろしくお願いいたします。
今までの進捗状況をお伝えしますと・・・
○Inventorをインスコしました。
かなりしっかりした3DCADソフトです。
ちなみに、PCの推奨スペックはコチラ (※PDFです)
---(ここから要約)---
推奨スペック
CPU: Pentium 4 3.0GB以上
メモリ: 3GB以上
HDD: 3.5GB以上の空き容量
---(ここまで要約)---
・・・アホかと。
HDDは結構使うんやね。。。程度の印象だけど、
CPUは。。。最近の良いマシンならクリアできるのかな。。。
メモリは。。。個人でこんなマシン持ってる人いるんでしょうか!?
そんなん無理っすわ。
(まぁ、個人で買うようなことを想定してるソフトじゃないんで、いいんですけどね。。。)
ってことで、自分のPCのスペック公開
CPU: Duron 950MHz (AMD)
メモリ: 512MB
HDD: 20GB空き (トータル50GBくらい)
本気でデルコンあたりを買おうか考えました。。。
金銭的に無理でした。。。orz
ってことで、このスペックで戦っていきます。
○メカ構成を妄想
たぶん今回、ネックになるのがサイズと質量。
そして、上記を満たしながら30Gに耐える構造。
というわけで、ロボットの全体構成を妄想していました。
サーボの選定がかなり重要になってきそうなので、のんびり選んでました。
あと、角速度を抑える手段。
以前のミッションでは、スラスター(推力発生装置)を使ってたみたいですが、
今回は。。。使っていいのかな?
とりあえず、今回のミッションでは、スラスターなしでもいけそうなので
ナシで行ってみます。
【リアクションホイール】でしたっけ?
ジャイロちっくなコマを仕込んでみようと思います。
○制御系を妄想
なぜか、たまたま、MATらぶを使用できる環境にあるので、
しみゅリンク使って超簡単なロボットのモデル(直方体で質量だけ1kgにしたもの)を
使って角速度を抑えるシミュレーションをしてみました。
これでうまくいってから設計をしようかな~と思ったので。
予想以上に時間がかかってしまいましたが、なんとかなりそうです。
いちおう、結果はコチラ↓
1[s]にロボット角速度をステップ状に1を入力しています。
えぇ~っと、ネタバレするので、よく見ないでください。
何かをパクっていただいても構いませんが、何も保証しません。
古典制御ってやつです。
PIDブロックを6個くらい使ってしまいました。
○メカを作りはじめる。
再びInventorに戻って設計を始めたのが、ついさっき。
あらあら、出遅れてますね。
とりあえず、予定しているRobot Labsのサーボを超テキトーに書いてみました。
さらに、1000cm^3の箱と一緒にならべてみました。
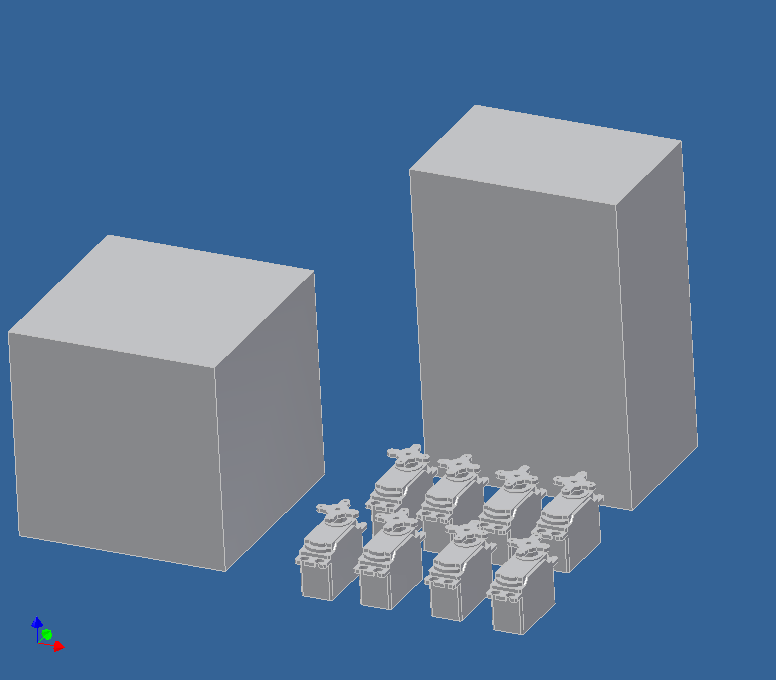
・・・これ、16軸も入らねぇだろっ!!
まぁ、ここら辺は、今後がんばっていきますよ。
さて、長くなってしまいました。
これを読んで何か得する方は、まずいないでしょう。
備忘録なんで。
では、
ぐっばいマルコフ。